华测GPS的工作原理,怎么与卫星连接与定位的?
在说RTK之前我们先说说GPS是怎么与卫星相连定位的。以美国全球定位系统为例,来说明卫星定位的基本原理。
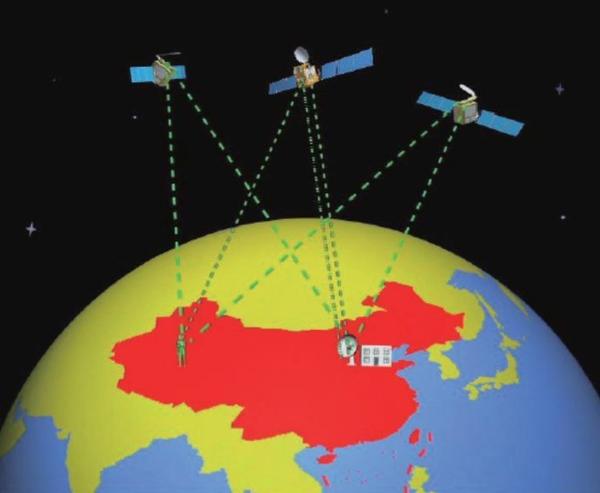
24颗GPS卫星在离地面2万200千米的高空上,以12小时的周期环绕地球运行,使得在任意时刻,在地面上的任意一点都可以同时观测到4颗以上的卫星。
由于卫星的位置精确可知,在GPS观测中,我们可得到卫星到接收机的距离,利用三维坐标中的距离公式,利用3颗卫星,就可以组成3个方程式,解出观测点的位置(X,Y,Z)。考虑到卫星的时钟与接收机时钟之间的误差,实际上有4个未知数,X、Y、Z和钟差,因而需要引入第4颗卫星,形成4个方程式进行求解,从而得到观测点的经纬度和高程。
事实上,接收机往往可以锁住4颗以上的卫星,这时,接收机可按卫星的星座分布分成若干组,每组4颗,然后通过算法挑选出误差最小的一组用作定位,从而提高精度。
由于卫星运行轨道、卫星时钟存在误差,大气对流层、电离层对信号的影响,以及人为的SA保护政策(2000年5月1日取消),使得民用GPS的定位精度只有100米。为提高定位精度,普遍采用差分GPS(DGPS)技术,建立基准站 (差分台)进行GPS观测,利用已知的基准站精确坐标,与观测值进行比较,从而得出一修正数,并对外发布。接收机收到该修正数后,与自身的观测值进行比较,消去大部分误差,得到一个比较准确的位置。实验表明,利用差GPS,定位精度可提高到5米。
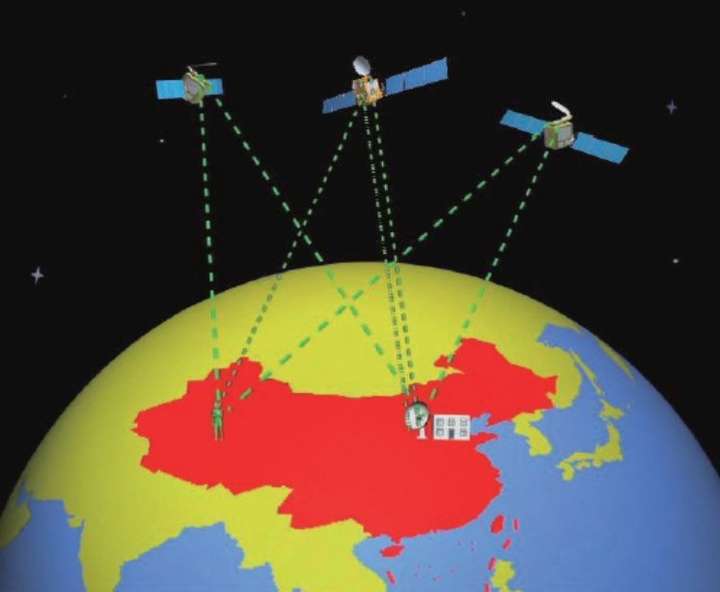
RTK定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理。流动站可处于静止状态,也可处于运动状态。RTK技术的关键在于数据处理技术和数据传输技术。
RTK(Real Time Kinematic)实时动态定位技术,是一项以载波相位观测为基础的实时差分GPS测量技术,是利用两台或两台以上GPS接收机同时接收卫星信号,其中一台安置在已知坐标点上作为基站,其它作为移动站。在RTK作业模式下,基站通过数据链将其观测值和测站坐标信息一起传送给移动站。移动站不仅通过数据链接收来自基站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出毫米级的定位结果,历时不到一秒钟。移动站可处于静止状态,也可处于运动状态;可 在固定点上先进行初始化后再进入动态作业,也可在动态条件下直接开机,并在动态环境下完成周模糊度的搜索求解。在整周未知数解固定后,即可进行每个历元的 实时处理,只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形,移动站可随时给出毫米级定位结果。RTK技术受外界条件限制小,只要满足工作条件, 就能快速、高精度地完成定位作业。